Next: Future Work
Up: Interpolation
Previous: Quaternion interpolation
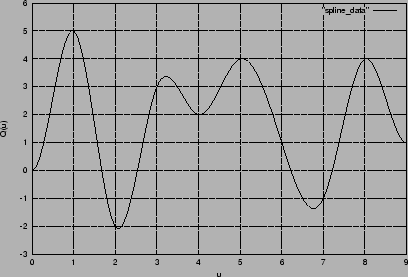
one dimensional spline example
The BSpline interpolation is implemented as described in [watt92]. Input
is a set of n one dimensional data points Xi
![\( i\in \left[ 0\ldots n-1\right] \)](img26.png) and
a knot vector
and
a knot vector
 containing n+6 knots. A set of
n+2 control points pi are generated so that a cubic spline
with those control points will fit the data. The control points are such that
p0=p1 and
pn+1=pn+2. We also subject the curve to
the constraint that
containing n+6 knots. A set of
n+2 control points pi are generated so that a cubic spline
with those control points will fit the data. The control points are such that
p0=p1 and
pn+1=pn+2. We also subject the curve to
the constraint that
![\( \forall i\in \left[ 0,n\right] . \)](img29.png) This means that the curve is defined over the interval
This means that the curve is defined over the interval
![\( \left[ t_{3},t_{n-1}\right] . \)](img30.png) This system of equations is then solved to get the control points for the curve.
This system of equations is then solved to get the control points for the curve.
The curve at time u is given by a weighted sum of the control points
 The
Blending functions are as follows:
The
Blending functions are as follows:
Higher dimensional interpolants can be generated by interpolating each element
independently.
In general, the interpolation of a parameter proceeds as follows:
control_points = get_control_points(data, knots);
interpolant = spline_at(t, control_points);
brian martin
1999-06-23