For various reasons, interpolation rotation with Euler angles is less than ideal. A naive approach to rotational interpolation could be to simply interpoloate between each Euler angle to produce inbetween frames. But the motion specified by such a rotation is oftentimes jerky and ill specified. This is illustrated by there not being a unique path between every two orientations across different coordinate systems. For these reasons quaternion interpolation of the rotational parameters is performed. Interpolating in quaternion space ensures a unique path under all circumstances.
Since Euler angles present a more agreeable user interface, the process of quaternion
interpolation starts by generating a rotation matrix R from a set of
Euler angles. This matrix is then lifted into quaternion space where the rotation
is specified by a quaternion
![]() where v specifies an axis of rotation and
where v specifies an axis of rotation and ![]() the angle by
which to rotate around the axis. Note that q is a unit quaternion, so
the set of rotation matrices corresponds to the set of quaternions on the unit
hypersphere.
the angle by
which to rotate around the axis. Note that q is a unit quaternion, so
the set of rotation matrices corresponds to the set of quaternions on the unit
hypersphere.
Rotation can then be carried out directly in quaternion space by encoding a
point to be rotated as a pure quaternion
![]() and
producing a rotated pure quaternion qr by
qr=qqpq-1.
It is oftentimes beneficial to concatenate other transformations along with
rotations however, so after interpolation q is transformed back into
a rotation matrix.
and
producing a rotated pure quaternion qr by
qr=qqpq-1.
It is oftentimes beneficial to concatenate other transformations along with
rotations however, so after interpolation q is transformed back into
a rotation matrix.
Since the set of quaternions that specify rotations live on the unit hypersphere, a direct interpolation between quaternions does not produce the desired result, as interpolants would stray from the hypersphere. Instead a spherical interpolation is performed. This procedure is outlined in [watt92].
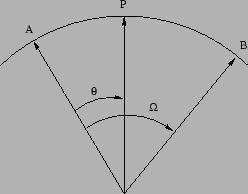
The function slerp does a spherical linear interpolation between two quaternions
A and B by an amount
![]() :
:
To achieve C2 continuity between curve segments, a cubic interpolation
must be done. In quaternion space this is somewhat complicated. The method used
is to compose a cubic interpolation as a set of three linear interpolations.
First between the data points and two other (carefully chosen) points, and then
between the remaining points by an amount specified by the logistic equation
![]() with r=2. If the auxiliary points are chosen
properly, then C2 continuity can be ensured. The function squad does
a cubic interpolation between data points b0 and b3 by an
amount
with r=2. If the auxiliary points are chosen
properly, then C2 continuity can be ensured. The function squad does
a cubic interpolation between data points b0 and b3 by an
amount
![]()
The points S1 and S2 are called inner quadrangle points,
and have to be chosen carefully so that continuity is guaranteed across segments.
Given a quadrangle of quaternions,
![]() where qi and qi+1 are our data points, we can guarantee
C2 continuity by choosing ai and ai+1 as follows:
where qi and qi+1 are our data points, we can guarantee
C2 continuity by choosing ai and ai+1 as follows:
For more information see [shoe87].
We can summarize the process of interpolating between two rotation matrices as follows
interpolate_rotation(mat[n],t)
t_int = int(t);
t_fract = t - t_int;
q_0 = mat2quat(mat[t_int-1]);
q_1 = mat2quat(mat[t_int]);
q_2 = mat2quat(mat[t_int+1]);
q_3 = mat2quat(mat[t_int+2]);
i_1 = inner_quad_point(q_0, q_1, q_2);
i_2 = inner_quad_point(q_1, q_2, q_3);
q_i = slerp(slerp(q_1, q_2, t_fract),
slerp(i_1, i_2, t_fract),
2*t_fract*(1-t_fract);
return mat2quat(q_i);