Next: Ray Casting algorithm
Up: Ray Caster
Previous: Ray Caster
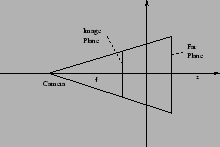
Camera Model
The Camera model is defined as follows:
The camera is by default looking down positive z, at the image plane
at
 The distance from the image plane to the camera is
the focal length f. The far plane can be placed at any
The distance from the image plane to the camera is
the focal length f. The far plane can be placed at any

To Transform points from quaternion coordinates to camera coordinates, the following
transformation is applied:

- pc
- The point in camera coordinates.
- Rc
- The camera rotation matrix. This matrix rotates the camera. It
is applied after the camera has been translated to the origin so that rotation
is about the projection point.
- Rq
- The quaternion fractal rotation matrix. It is applied when the
julia set is centered at the origin.
- Sq
- The fractal scaling matrix. It is also applied when the julia
set is centered at the origin.
- pq
- Quaternion point. The point
![\( p_{q}=\left[ \begin{array}{ccc}
x_{q} & y_{q} & z_{q}
\end{array}\right] \)](img4.png) defines a quaternion
defines a quaternion
![\( q=\left[ \begin{array}{cccc}
x_{q} & y_{q} & z_{q} & 0
\end{array}\right] . \)](img5.png)
- Tq
- The quaternion translation vector. This is applied after rotating
and scaling pq.
- Tc
- Camera translation vector.
![\( T_{c}=\left[ \begin{array}{ccc}
0 & 0 & f+\frac{1}{2}
\end{array}\right] . \)](img6.png) This is used to rotate the camera by translating the projection center to the
origin.
This is used to rotate the camera by translating the projection center to the
origin.
-
Next: Ray Casting algorithm
Up: Ray Caster
Previous: Ray Caster
brian martin
1999-06-23